بهینه سازی عملکرد کنترلر PID کامسول
انجام پروژه کامسول بهینه سازی عملکرد کنترلر PID کامسول
بهینه سازی عملکرد کنترلر PID کامسول ، تصور کنید در یک سفر جادهای هستید و با سرعت 60 مایل در ساعت در بزرگراه حرکت میکنید. برای حفظ این سرعت، تصمیم می گیرید کروز کنترل را روشن کنید. به هر حال، شما در تعطیلات هستید – چرا اجازه نمی دهید ماشین کار را برای شما انجام دهد؟ چه از سربالایی و چه در سراشیبی بروید، خودرو به تغییر سرعت واکنش نشان می دهد، به طور خودکار شتاب می گیرد یا کاهش می یابد. این نوع کنترل فرآیند به لطف یک کنترل کننده انتگرالی مشتق (PID) متناسب است. با استفاده از شبیه سازی، مهندسان می توانند این نوع دستگاه کنترل را بهینه کنند.
کنترل فرآیند ناوبری و انجام پروژه comsol
هنگام فاکتورگیری متغیرهایی مانند سرعت، دما، سرعت جریان، فشار و غیره، مهندسان فرآیند میتوانند از کنترل مداوم خودکار برای تنظیم سیستمها استفاده کنند. کنترل فرآیند همه چیز در مورد سازگاری، مدیریت انواع فرآیندهای پیچیده از طریق سیستم ها یا دستگاه های کنترل است. شکل اولیه کنترل فرآیند خودکار، گاورنر گریز از مرکز بود که از وزنه های چرخشی برای دستیابی به تعادل در سیستم هایی مانند آسیاب های بادی استفاده می کرد. خیلی بعد، نسخه ای از گاورنر در موتورهای بخار و گاورنرهای آونگی برای کنترل سرعت اعمال شد.
در دهه 1920، مهندس نیکلاس مینورسکی ایده استفاده از PID را به عنوان نوعی کنترل داشت. او از تماشای سکاندارانی که کشتیها را هدایت میکردند، الهام گرفت و به صورت دستی مسیر را در هنگام بادهای شدید و دریاهای متلاطم اصلاح میکرد. مینورسکی در حین کار بر روی سیستمهای فرمان در یک ناو جنگی ایالات متحده، شروع به توسعه فرمولی برای تئوری کنترل کرد که به کنترل سهمدت PID که امروزه میشناسیم تکامل یافته است. با گذشت زمان، دستگاههای PID چندین بار تکرار شدهاند (با فناوری به روز شده از پنوماتیک به الکترونیک). یک کنترل کننده PID یک مکانیسم بازخورد مبتنی بر الگوریتم است که به طور مداوم خطای بین یک نقطه تنظیم مورد نظر (SP) و یک متغیر فرآیند (PV) را محاسبه می کند. کنترلکنندههای PID را میتوان در مکانیزمهایی به کار برد تا سیستم را به طور خودکار اصلاح کند و PV آن را در SP مورد نظر نگه دارد (مانند حفظ سرعت معین برای یک ماشین در حال حرکت). شرایط ریاضی PID
الگوریتم تناسبی – انتگرال – مشتق از سه عبارت کنترلی تشکیل شده است که با هم کار می کنند تا بهترین پاسخ را به دست آورند. هر عبارت بر اساس سیگنال های کنترل SP و PV محاسبه متفاوتی انجام می دهد. هنگامی که این سه عبارت با هم استفاده می شوند، دستگاه یک سیگنال کنترلی تولید می کند که اصلاحاتی را برای بازگشت به SP مورد نظر انجام می دهد.
هر یک از اصطلاحات PID جنبه ای از کنترل است که خطا را حذف می کند، به عنوان محاسبه ای برای حال، گذشته و آینده خطا:
Proportional: خروجی متناسب با مقدار خطای فعلی را می دهد.
انتگرال: مقادیر گذشته خطا را در طول زمان ادغام می کند تا ضریب I را محاسبه کند. این قسمت برای به صفر رساندن خطا ضروری است و بنابراین تقریباً همیشه شامل می شود.
مشتق: نرخ تغییر خطای آینده را برای جبران هر گونه مازاد بر اثر فاکتورهای P و I برآورد می کند. این قسمت اغلب خاموش می شود زیرا در کاربردهای عملی، می تواند اثر اختلالات تصادفی را تقویت کند و سپس بر پایداری کنترل کننده تأثیر منفی بگذارد.
اغلب، از ترکیب PI استفاده می شود، با PID گاهی اوقات، و به ندرت از PD (مانند برای کنترل سروموتورها) استفاده می شود. P همچنین می تواند به تنهایی مورد استفاده قرار گیرد. انجام پروژه comsol شبیه سازی کنترل فرآیند با دستگاه PID
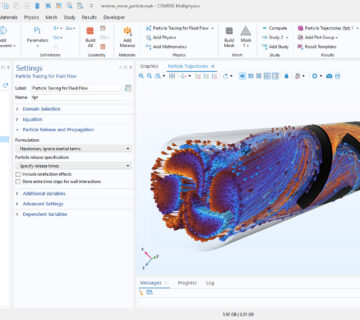
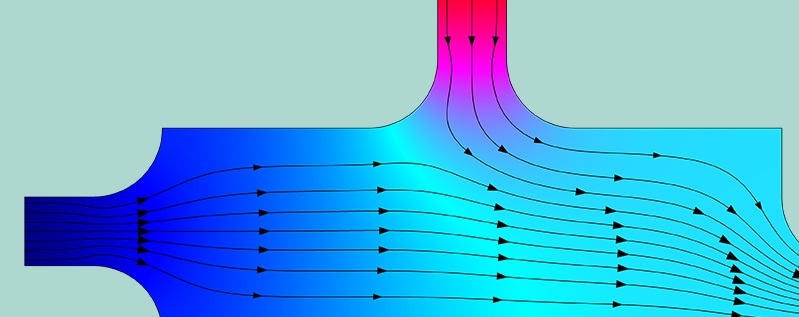
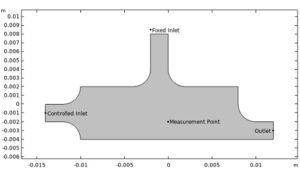
در این مدل از محفظه احتراق، انجام پروژه comsol انتقال جرم و جریان سیال با دو ورودی (یک ورودی ثابت بالا و یک ورودی سمت چپ کنترل شده) به همراه یک کنترلر PID کوپل شده است. در داخل محفظه، دو جریان گاز، هر کدام با غلظت اکسیژن متفاوت، ترکیب می شوند. در اینجا، PV برای کنترل جریان، غلظت اکسیژن در یک نقطه اندازهگیری معین در محفظه است.
کنترل کننده PID برای دستیابی به غلظت مورد نظر (SP) 0.5 mol/m3 در نقطه اندازه گیری استفاده می شود. این کار را با تنظیم سرعت ورودی سمت چپ، افزایش یا کاهش جریان گاز با محتوای اکسیژن کمتر انجام می دهد. گاز با محتوای اکسیژن بالاتر از طریق ورودی بالایی با سرعت 10 میلی متر بر ثانیه وارد می شود.
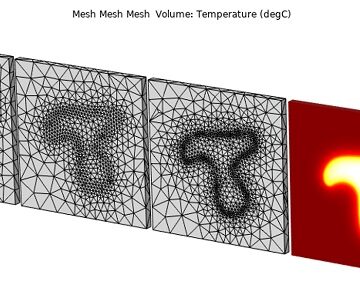
برای محاسبه جریان در محفظه، از رابط جریان لایه ای استفاده می کنیم که سرعت و فشار جریان را محاسبه می کند. سپس، برای محاسبه موازنه جرم، رابط حمل و نقل گونه های رقیق شده استفاده می شود، که برای همرفت و انتشار که برای دو جریان جریان و شار گونه های شیمیایی رخ می دهد، استفاده می شود. (برای جزئیات در مورد شرایط مرزی معادله حمل و نقل انبوه، به مستندات مدل مراجعه کنید.)

اندازه گیری غلظت با استفاده از ویژگی Domain Point Probe شبیه سازی شده است. الگوریتم PID با متغیرهای تعریف شده توسط کاربر و معادلات جهانی پیاده سازی شده است. انجام پروژه کامسول در الگوریتم سرعت کنترل شده توسط PID را با پارامترهای زیر محاسبه می کند:
cset – نقطه تنظیم
kp – ضریب متناسب
kl – ضریب انتگرال
kD – ضریب مشتق
برای این مثال، ما بر تأثیر تغییر ضریب متناسب (kp) تمرکز خواهیم کرد.
ارزیابی نتایج شبیه سازی
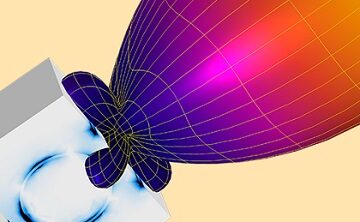
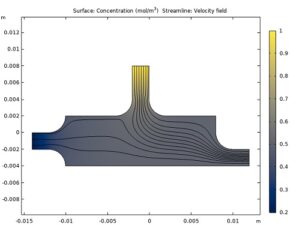
ابتدا، در داخل محفظه، اجازه دهید نگاهی به دو عکس فوری از خطوط جریان سرعت و غلظت اکسیژن بعد از 0.1 ثانیه (شکل سمت چپ) و 1.5 ثانیه (راست) بیندازیم.