
شبیه سازی قطعات با کامسول بدون محدودیت در تحلیل های ساختاری
شبیه سازی قطعات با کامسول هنگام ساخت مدلها در مکانیک جامدات، اغلب بخشی داریم که در آن هیچ محدودیتی وجود ندارد که بتوانیم به طور منطقی اعمال کنیم. چندین استراتژی مختلف وجود دارد که می توانیم در چنین مواردی بسته به هندسه استفاده کنیم. بیایید نحوه استفاده از این رویکردهای مختلف و تفاوت های ظریف آنها را بررسی کنیم.
مسئله مکانیک جامدات
ما با در نظر گرفتن یک مدل ساده از یک صفحه مسطح با سوراخی از طریق آن شروع خواهیم کرد – یک مسئله کلاسیک در مکانیک جامدات. بیایید فرض کنیم که نیروهای مساوی و مخالف در بالا و پایین اعمال می شوند. شاید تصور کنید که این قسمت از طریق فیکسچر به برخی از کابل ها متصل شده و تحت کشش قرار می گیرد.
اگرچه میتوانیم مدلی از وسایل و کابلها و مدلی از هر کابلی که به آن وصل است بسازیم، اما احتمالاً این تلاش بسیار بیشتر از آن چیزی است که میخواهیم خرج کنیم. ما واقعاً فقط میخواهیم تجزیه و تحلیل خود را بر روی این یک بخش از یک سیستم بزرگتر متمرکز کنیم، بنابراین منطقی است که همه این بخشهای دیگر را به عنوان یک بار مرزی که برای انتهای صفحه نرمال است، تقریب کنیم.

اکنون، ما به طور شهودی می دانیم که بخشی با نیروهای مساوی و مخالف هیچ شتابی را تجربه نخواهد کرد، بنابراین اگرچه قطعه تغییر شکل می دهد، اما در حال حرکت نخواهد بود. یعنی میتوانیم با اطمینان بگوییم که راهحل ثابتی برای این مشکل وجود دارد، حتی اگر ندانیم که قطعه کجاست یا جهت آن چگونه است. یعنی نیروهای اعمال شده می توانند با هر جهت دلخواه همسو شوند و راه حل از نظر تنش ها و کرنش ها همچنان یکسان باشد.
شبیه سازی قطعات با کامسول
اکنون، وقتی یک مسئله مکانیک جامدات را از طریق روش اجزای محدود حل میکنیم، مستقیماً تنشها یا کرنشها را حل نمیکنیم. در عوض، جابجایی ها (یا تغییر شکل ها) را از حالت تغییر شکل نیافته حل می کنیم. تنش ها و کرنش ها از میدان جابجایی محاسبه می شوند.
آموزش کامسول استفاده از صفحات متقارن
برای این هندسه، تحلیلگر ساختاری با تجربه بلافاصله متوجه خواهد شد که سه سطح تقارن وجود دارد که می توان از آنها بهره برداری کرد. میتوانیم قسمتی را که با سیستم مختصات دکارتی همتراز است ترسیم کنیم و از پارتیشنبندی در امتداد صفحات کاری موازی با صفحات xy-، yz- و xz- استفاده کنیم. این مدل ما را به یک مدل فرعی 1/8 از مدل اصلی ما کاهش می دهد. شرط تقارن را روی سه وجه در امتداد این صفحه ها اعمال می کنیم و این باعث می شود که قسمت ما کاملاً محدود شود. علاوه بر این، این اثر جانبی مفید کاهش اندازه محاسباتی مدل ما دارد. بیایید دقیقاً به این فکر کنیم که این سه شرط تقارن چگونه قطعه را محدود میکنند. شرط تقارن تحمیل می کند که هیچ جابجایی در جهت عادی به مرزهای انتخاب شده (مسطح) وجود نداشته باشد. بنابراین، شرط تقارن اعمال شده بر روی وجهی موازی با صفحه xy، این شرط را تحمیل می کند که این وجه در جهت z جابجایی صفر داشته باشد و هیچ چرخشی در مورد محور x و محور y وجود نداشته باشد.

در مرحله بعد، شرط تقارن در وجه موازی yz شرایط اضافی را تحمیل می کند که هیچ جابجایی در جهت x و هیچ چرخشی حول محور z وجود نداشته باشد. چرخش حول محور y یک بار دیگر محدود می شود، اما این یک مشکل نیست.
در نهایت، شرط تقارن در وجه موازی xz محدودیت اضافی عدم جابجایی در جهت y را تحمیل می کند.
انجام پروژه کامسول شبیه سازی قطعات
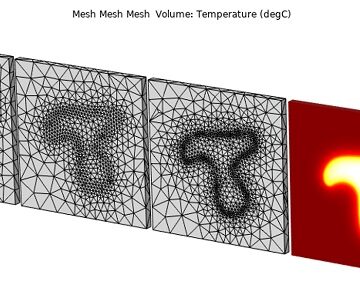
بنابراین، ما مجموعه ای از سه محدودیت متعامد را روی جابجایی ها و چرخش ها اعمال کرده ایم، بنابراین قطعه به اندازه کافی محدود شده است و مدل قابل حل است. برای تجسم نتایج، استفاده از مجموعهای از سه مجموعه داده سهبعدی Mirror مفید است که میتواند هر مجموعه دادهای را در مورد یک صفحه بهگونهای منعکس کند که بخش کامل قابل مشاهده باشد.
شبیه سازی قطعات با کامسول قطعات بدون تقارن

متأسفانه، ما معمولاً آنقدر خوش شانس نیستیم که قطعه ای با سه سطح تقارن داشته باشیم. بیایید قسمت خود را با وارد کردن یک مخروط به سوراخ، و تغییر مکان آن، همانطور که در زیر نشان داده شده است، تغییر دهیم. اجازه دهید ابتدا در امتداد محور x از این نقطه نگاه کنیم تا نقطه دیگری پیدا کنیم. در آنجا، یک شرط جابجایی تجویز شده دیگر را برای حذف چرخش جسم صلب اعمال می کنیم، اما باید مطمئن شویم که محدودیتی اعمال نمی کنیم که بر کرنش ها و تنش ها تأثیر بگذارد. راه دیگر بیان این است که ما نمی خواهیم محدودیتی برای فاصله بین این دو نقطه اعمال کنیم. بنابراین، در این نقطه دوم، جابجایی را در جهتهای y و z محدود میکنیم، اما جابجایی x را بدون محدودیت میگذاریم. این محدودیت به ترتیب چرخش حول محور z و محور y را حذف می کند. بخش اکنون فقط برای چرخش حول محور x آزاد است و میتوانیم این آزادی را با یک محدودیت نقطه دیگر حذف کنیم.
اگر به نقطه کاملاً محدود اولیه خود برگردیم، اکنون می توانیم در امتداد محور y یا محور z نگاه کنیم تا زمانی که نقطه ای را پیدا کنیم. بیایید در جهت z جستجو کنیم، و هنگامی که نقطه ای را پیدا کردیم، می توانیم یک شرط جابجایی تجویز شده را اعمال کنیم به طوری که جابجایی در جهت y صفر باشد. این از چرخش قطعه حول محور x جلوگیری می کند. باز هم، ما باید مطمئن شویم که فاصله بین هیچ یک از این نقاط را محدود نمی کنیم. میتوانید همین الان برای آموزش comsol اقدام کنید.

با این حال، ممکن است یک سوال ایجاد کند: چه اتفاقی میافتد وقتی سه نقطه همسو با محورهای دکارتی نداشته باشیم؟ در صورت استفاده از روش اول، یعنی Rigid Motion Suppression، این ویژگی به طور خودکار میتواند هر سه نقطه را که یک صفحه را تشکیل میدهند انتخاب کند و مجموعهای از محدودیتها را اعمال کند. بیایید همچنین ببینیم که چگونه می توانیم از هر سه نقطه استفاده کنیم، تا زمانی که آنها یک هواپیما را توصیف کنند. مقاله شبیه سازی پمپ توربومولکولی با کامسول را میتوانید مطالعه کنید.
در رویکرد سوم، بیایید با همان هندسه کار کنیم، اما با استفاده از سه نقطه که با محورهای دکارتی همسو نیستند، محدود کنیم. ابتدا باید یک Workplane تعریف کنیم، سپس یک سیستم مختصات را با استفاده از آن صفحه کار تعریف کنیم، و در نهایت از آن سیستم مختصات در شرایط جابجایی تجویز شده خود استفاده کنیم.