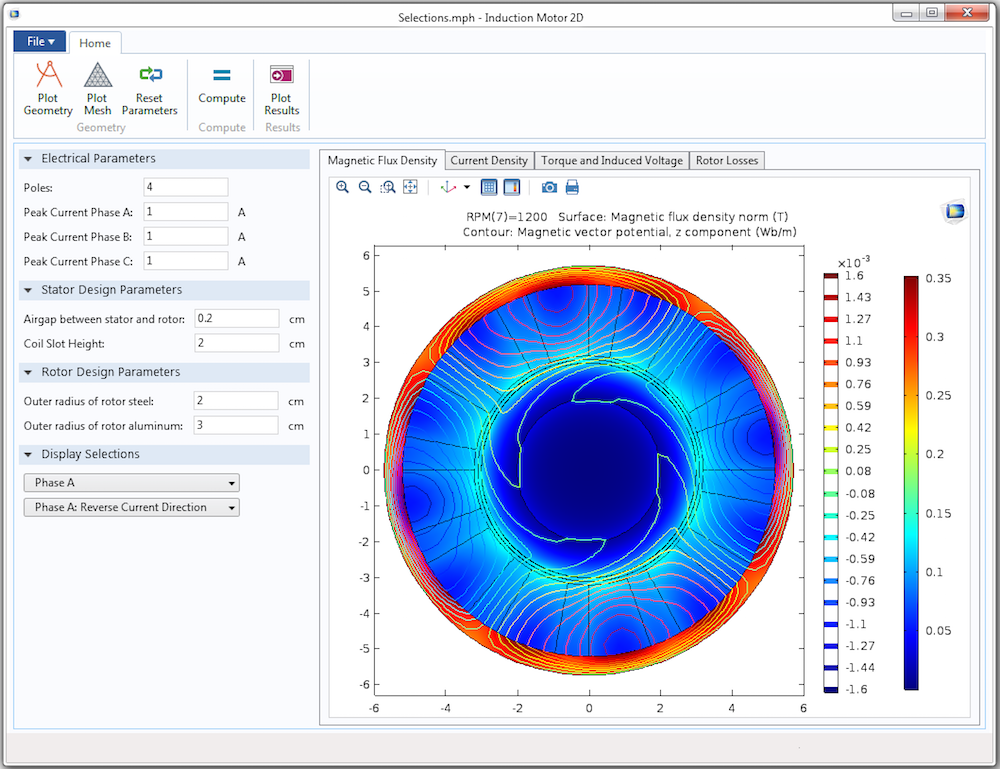
آموزش کامسول برق و شبیه سازی و بهینه سازی سیم پیچ در ماشین های الکتریکی نحوه خودکارسازی طراحی سیم پیچ در ماشین های الکتریکی با کامسول برقجدا از نوع سیم پیچ، متمرکز یا توزیع شده، منطق پشت طراحی ماشین های الکتریکی نسبتا مشابه است، زیرا بر اساس نمودار فازور آنها است. با استفاده از یک مدل محک موتور القایی با سیم پیچ متمرکز، به شما نشان خواهیم داد که چگونه در نرم افزار COMSOL انتخاب هایی ایجاد کنید تا تجزیه و تحلیل طراحی سیم پیچ خود را ساده کنید.

مدل نمونه موتور القایی
حالت های کار و انواع ماشین های الکتریکی با نحوه اتصال سیم پیچ آنها تعریف می شود. اصل اساسی عملکرد آنها بر اساس ولتاژها و جریان هایی است که از این سیم پیچ ها عبور می کنند. مستقل از نوع ماشین، سیمپیچها را میتوان به صورت متمرکز یا پراکنده طبقهبندی کرد و زیر مجموعههای دیگری مانند کسری و انتگرال نیز اعمال میشود.
برای سیمپیچهای متمرکز، همانطور که از نام آن پیداست، هر قطب در ماشین مجموعهای از هادیها دارد که از همان شکاف عبور میکنند. از سوی دیگر، برای سیم پیچ های توزیع شده، تعداد شیارها از تعداد قطب ها بیشتر خواهد بود، بنابراین هادی های هر قطب بین تعداد شیارها توزیع می شوند. مزایا و تفاوتهای استفاده از سیمپیچهای متمرکز در مقابل سیمپیچهای توزیع شده خارج از محدوده این پست وبلاگ است.

مدل موتور القایی ما با استفاده از گام قطب 60 درجه ساخته شده است. این به این معنی است که 60 درجه از پایین یک شکاف استاتور به دیگری جدا می شود. برای ایجاد برخی خطوط چگالی شار یکنواخت و اطمینان از القای روی روتور فولادی برای ایجاد حرکت، باید اطمینان حاصل کنیم که بین هر شکاف استاتور مقداری جدایی وجود دارد. در بسیاری از توپولوژی های روتور، این شکاف با دندان استاتور پر می شود. با این حال، در این مثال، ما 15 درجه شکاف هوا را انتخاب کرده ایم، به این معنی که هر شکاف استاتور 45 درجه از 60 درجه کامل مورد نیاز را پوشش می دهد.
در این مرحله، آنچه ما توضیح دادیم ممکن است پیچیده به نظر برسد، اما در واقع بسیار ساده است. همانطور که قبلا ذکر کردیم، طراحی سیم پیچ ها در ماشین های الکتریکی به نمودار فازور ولتاژ آنها بستگی دارد. در شکل زیر خطوط آبی نشان دهنده فازها و خطوط نارنجی نشان دهنده همتایان منفی آنها هستند.
![]()
![]()
موتور القایی مورد استفاده برای این مثال یک ماشین سه فاز و دو قطبی است و دقیقاً می توان آن را با نمودار فازور توصیف کرد، جایی که 60 درجه گام قطب را در استاتور مشخص می کند. تنها چالش در اینجا این است که این زوایای جدایی بین هر استاتور فقط در حالت دو قطبی کار می کند. ما باید بین زوایای الکتریکی نشان داده شده در نمودار فازور که حرکت دایره ای روتور را توصیف می کند و زاویه مکانیکی واقعی که موقعیت فیزیکی هر شکاف استاتور را توصیف می کند، رابطه ایجاد کنیم. زاویه الکتریکی با معادله زیر نشان داده می شود:

در گره Definitions میتوانیم انتخابهایی ایجاد کنیم، یعنی موجودیتهای هندسی مانند دامنهها، مرزها، یالها و نقاط را گروهبندی کنیم. برای ماشین دو قطبی، دو نقطه مورد توجه وجود دارد: شناسایی شکاف استاتور مربوط به هر فاز و شناسایی جهت جریان (داخل یا بیرون). توجه داشته باشید که در حالی که چندین روش برای انجام یک عملیات وجود دارد، این مورد خاص به عنوان نمونه ای از نحوه استفاده از انتخاب ها در یک مدل است.



در شکل زیر، انتخاب توپ را به گونهای پارامتر کردهایم که همیشه میتوانیم نقطه میانی هر شکاف استاتور را انتخاب کنیم. همانطور که قبلا ذکر شد، گام سیم پیچ 45 درجه است و از آنجایی که ما با یک هندسه دایره ای کار می کنیم، به راحتی می توان مختصات x و y را برای دنبال کردن هر مکان سیم پیچ در اطراف هندسه پارامتر کرد:
به اسکرین شات نشان داده شده در بالا نگاه کنید. توپ 1 نشان دهنده فاز A و توپ 2 نشان دهنده فاز A است. این عناصر تحت یک انتخاب واحد از طریق ویژگی انتخاب اتحادیه جمع آوری شده اند. این به ما این امکان را می دهد که به راحتی آنها را از رابط فیزیک تحت هر ویژگی Coil فراخوانی کنیم.


ترتیب مراحل تعیین کننده جهت حرکت روتور خواهد بود. بنابراین ما از همان دنباله مثال اصلی استفاده خواهیم کرد و از فاز A شروع می کنیم. حال بیایید یک ماشین چهار قطبی را در نظر بگیریم و زاویه الکتریکی و زاویه مکانیکی و همچنین فاز و جهت جریان را شرح دهیم. جدول زیر نمای کلی از این عناصر را ارائه می دهد.
اگر به صورت دستی انجام شود، این کار می تواند نسبتا خسته کننده شود. برای انجام همان عملیات، باید دوازده توپ انتخابی ایجاد کنیم، آنها را در سه اتحادیه گروه بندی کنیم و سپس هر جهت جریان معکوس را شناسایی کنیم. حالا تصور کنید که این کار را برای یک ماشین هشت یا ده قطبی انجام دهید و مجبور باشید هر انتخاب را برای هر طرح سیم پیچی به صورت دستی تغییر دهید.
توابع وارد شده به عنوان موقعیت های x و y در انتخاب توپ را می توان به ترتیب با عبارات زیر توصیف کرد:
جایی که θs گام سیمپیچ است و n فقط یک عدد صحیح است که از صفر تا تعداد کل سیمپیچها در مدل متغیر است.
از آنجایی که ما با سه فاز و دو جهت جریان کار می کنیم، می توانیم به راحتی از تابع mod (%) برای شناسایی دو ویژگی جالب هر سیم پیچ استفاده کنیم: جهت فاز و جریان. اگر شمارش سیم پیچ ها را از فاز A شروع کنیم تا زمانی که تمام زوایای مکانیکی برای هر شکاف سیم پیچ پوشانده شود، در نهایت به چیزی شبیه به جدول زیر در مورد چهار قطبی خواهیم رسید.
تصویر بالا فقط نحوه ایجاد انتخاب های فاز A را نشان می دهد. در اینجا، از سه شمارنده استفاده می کنیم: i از 0 تا آخرین سیم پیچ (11 در حالت چهار قطبی) می شمرد. اگر i%3 درست باشد، میتوان گفت که فاز A است و آن انتخابها را در آرایه فازA ذخیره میکنیم. سپس باید جهت فعلی را بررسی کنیم. اگر i% 2 0 باشد، جهت جریان منفی در نظر گرفته می شود و آن انتخاب ها را در آرایه دیگری به نامphaseArev ذخیره می کنیم.
تا به حال انتخاب توپ را ایجاد کرده ایم، اما هنوز باید اتحادیه ها را ایجاد کنیم. انجام این عملیات نسبتاً آسان است زیرا ما همیشه در مورد خود شش اتحاد خواهیم داشت: فاز A، فاز B و فاز C، همراه با سه اتحادیه مربوط به جهت جریان معکوس.
ما اکنون ایجاد انتخاب هایی را نهایی کرده ایم که به تعداد قطب های وارد شده توسط کاربران برنامه بستگی دارد. با زمان بیشتر و خلاقیت بیشتر، می توانید عملکرد این برنامه را از طریق ویرایشگر فرم گسترش دهید. این ابزار به شما امکان طراحی اپلیکیشنی را میدهد که به عنوان مثال، کاربران را قادر میسازد تا ویژگیهای مواد را اختصاص دهند، وابستگی زمانی راهحل (گذرا یا هارمونیک) را در نظر بگیرند و حتی پس پردازش را خودکار کنند. چنین ویژگی هایی در تصویر زیر مشخص شده اند.


