Multibody Module – آموزش کامسول
آموزش comsol و آموزش کامسول Multibody Module – پروژه کامسول
Multibody Module
آموزش کامسول در این پروژه، شبیه سازی از یک مکانیزم ساده لغزشی تا یک دستگاه جرثقیل مستحکم روی کامیون، هر مجموعه ای از بدنه های متصل که برای انتقال نیرو یا حرکت استفاده می شود را می توان به عنوان یک سیستم چند بدنه در نظر گرفت. شبیهسازی دینامیک سیستمهای چند بدنه با حرکت بزرگ همیشه مورد توجه مهندسان است، بهویژه کسانی که با خودروها و سایر ماشینآلات کار میکنند، جایی که نتایج یک مطالعه دینامیک چند بدنه اغلب به عنوان دستورالعملهایی برای طراحیهای اولیه عمل کرده است.
همراه با محبوبیت روزافزون، مدلسازی دینامیک چند بدنه، چالشهایی را برای مهندسان ایجاد میکند، عمدتاً هنگام مدلسازی سیستمهای بزرگ و واقعی. از آنجایی که هر وسیله نقلیه یا ماشین معمولی می تواند دارای تعداد قابل توجهی از قطعات باشد، تنظیم مدل برای چنین سیستم هایی به زمان زیادی نیاز دارد. هنگام برخورد با مدل های بزرگ، احتمال خطاهای دستی در هنگام تنظیم مدل نیز وجود دارد. در چنین شرایطی، توسعه روش هایی که می توانند تمام مراحل مدل سازی تکراری را با خودکار کردن آنها حذف کنند، سودمند خواهد بود. چنین رویکردی نه تنها روند مدل سازی شما را سرعت می بخشد، بلکه یک مدل بدون خطا برای تجزیه و تحلیل ارائه می دهد.
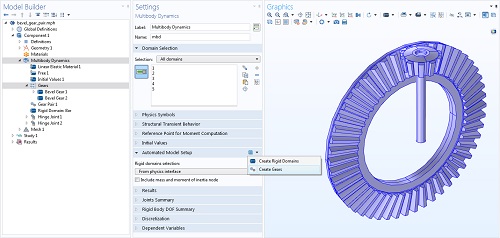
برای راه اندازی سریع سیستم های چند بدنه بزرگ برای شبیه سازی، COMSOL Multiphysics یک عملکرد جدید را در نسخه 5.5 معرفی کرد. با استفاده از قابلیت تنظیم خودکار مدل موجود در رابط Multibody Dynamics، می توانید به راحتی چندین گره فیزیک دامنه و چرخ دنده را همزمان از هندسه مدل ایجاد کنید.
همانطور که در تصویر زیر نشان داده شده است، بخش جدیدی به نام Automated Model Setup در پنجره Multibody Dynamics Interface Settings اضافه شده است. این شامل دو دکمه است:
ایجاد دامنه های سخت
Gears را ایجاد کنید.
این پروژه توسط متخصصین این سایت سیمولیت شده و روی نتایج آن تحلیل پارامتری صورت گرفته است.
شما میتونید برای انجام یا آموزش پروژه و پایان نامه خودتون به قسمت تماس با ما و آموزش کامسول مراجعه کنید
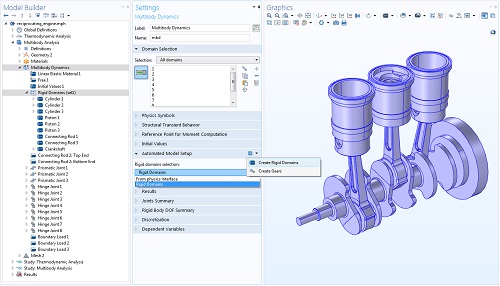
آموزش کامسول شبیه سازی مدلسازی دنده | انجام پروژه comsol
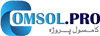
آموزش کامسول اگر میخواهید تولید گره دامنه سفت و سخت را خودکار کنید، دکمه Create Rigid Domains را فشار دهید. به طور مشابه، برای ایجاد خودکار گرههای Gear، دکمه Create Gears را فشار دهید. قابلیت تنظیم خودکار مدل در رابط Multibody Dynamics. می توانید برای ایجاد خودکار گره های فیزیکی مربوطه، دکمه Create Rigid Domains یا Create Gears را فشار دهید.
هنگامی که هر یک از دکمه ها فشار داده می شود، یک گروه گره حاوی گره های فیزیک مربوطه در Model Builder اضافه می شود. توجه داشته باشید که عملکرد این دکمه ها مستقل از یکدیگر است. این بخش همچنین حاوی ورودی های اضافی برای کنترل تولید دامنه سفت و سخت است. ایجاد خودکار دامنه سفت و سخت
در این بخش با مدل سازی سیستم های بدنه سفت و سخت بزرگ و استفاده از قابلیت Automated Model Setup برای سرعت بخشیدن به راه اندازی مدل برای چنین سیستم هایی آشنا می شویم.
همانطور که در بالا ذکر شد، یک سیستم چند بدنه عمومی مجموعه ای از بدنه های متصل، صلب یا انعطاف پذیر است. در حالی که اجسامی که تحت تأثیر بارهای خارجی تحت تغییر اندازه یا شکل قرار می گیرند به عنوان انعطاف پذیر تلقی می شوند، اجسام سفت با تغییر شکل ناچیز (صفر برای همه اهداف عملی) جسم صلب در نظر گرفته می شوند.
در دنیای واقعی، هیچ بدنه سفت و سخت ایده آلی وجود ندارد، اما برای بیشتر اهداف عملی، ما معمولا اجزای نسبتا سفت را به عنوان بدنه های صلب فرض می کنیم. این به ویژه زمانی صادق است که ما به تجزیه و تحلیل تنش دقیق این اجزاء علاقه مند نیستیم، بلکه به دینامیک کلی سیستم علاقه مندیم. از مدلسازی بدنههای صلب با استفاده از عملکرد مدل مواد دامنه صلب موجود در رابطهای Solid Mechanics و Multibody Dynamics پشتیبانی میکند.
این پروژه به صورت کامل توسط متخصصین این سایت انجام شده و تحلیل پارامتری روی نتایج آن صورت گرفته است، ازینرو میتوانید جهت آموزش comsol اقدام کنید.
برای انجام پروژه و پایان نامه در قسمت سفارش پروژه درخواست دهید تا در سریع ترین زمان ممکن، درخواست شما مورد بررسی قرار گیرد